ໃນປັດຈຸບັນ, ສ່ວນໃຫຍ່ຂອງ actuators ໃນຕະຫຼາດມີສອງປະເພດຂອງວິທີການຄວບຄຸມຜົນບັງຄັບໃຊ້:
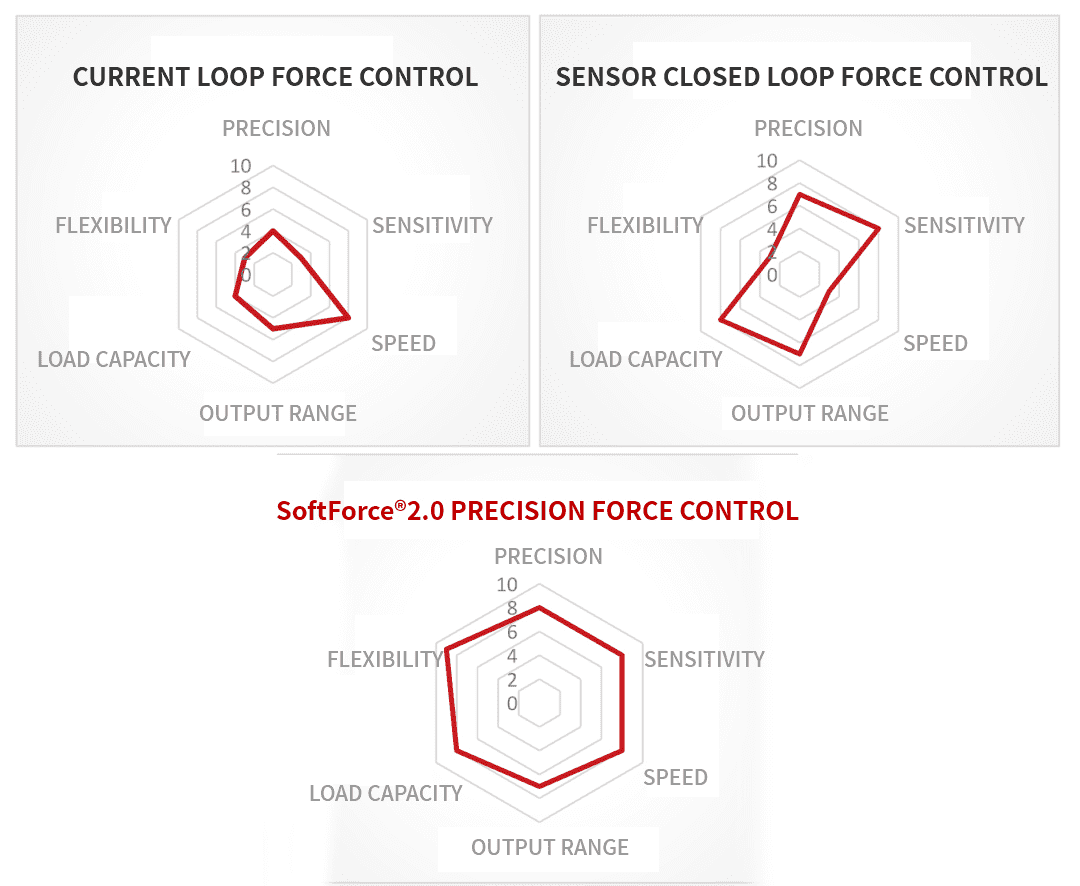
1. ການຄວບຄຸມຜົນບັງຄັບໃຊ້ loop ໃນປັດຈຸບັນ
ວິທີການຄວບຄຸມຜົນບັງຄັບໃຊ້ແບບດັ້ງເດີມທີ່ຂ້ອນຂ້າງງ່າຍທີ່ຈະປະຕິບັດ, ເຊິ່ງຮັບຮູ້ການຄວບຄຸມຜົນບັງຄັບໃຊ້ໂດຍການປັບກະແສໄຟຟ້າພາຍໃນຂອງມໍເຕີ.ປະໂຫຍດແມ່ນວ່າມັນມີຄວາມຫຍຸ້ງຍາກຫນ້ອຍທີ່ຈະປະຕິບັດ, ແລະມັນສາມາດບັນລຸການຄວບຄຸມການບັງຄັບຢູ່ໃນຂອບເຂດຂອງຄວາມຖືກຕ້ອງ 5% -15%;ຂໍ້ເສຍແມ່ນວ່າຄວາມໄວໃນການເຄື່ອນໄຫວຊ້າ, ມັນບໍ່ສາມາດຂັບໄລ່ຄືນໄດ້, ແລະມັນບໍ່ສາມາດຕອບສະຫນອງຄວາມຕ້ອງການຂອງບາງສະຖານະການທີ່ມີຄວາມຕ້ອງການຄວາມແມ່ນຍໍາສູງ.ຫຼັງຈາກໄລຍະເວລາຂອງການນໍາໃຊ້, ການສວມໃສ່ກົນຈັກຈະນໍາເອົາຄວາມຜິດພາດແລະຫຼຸດຜ່ອນຄວາມຖືກຕ້ອງຕື່ມອີກ.
ຕົວກະຕຸ້ນດັ່ງກ່າວປົກກະຕິແລ້ວບໍ່ມີເຊັນເຊີ, ແລະເຖິງແມ່ນວ່າມີເຊັນເຊີ, ພວກມັນພຽງແຕ່ຖືກໃຊ້ເປັນ "ການສະແດງຜົນ" ຂອງຜົນບັງຄັບໃຊ້ແລະບໍ່ມີສ່ວນຮ່ວມໃນການຄວບຄຸມ.ຕົວຢ່າງເຊັ່ນການເພີ່ມເຊັນເຊີໃສ່ກົດ, ເຊັນເຊີອ່ານຂະຫນາດຂອງແຮງ, ແລະສະແດງຄ່າຜ່ານເຄື່ອງວັດແທກ, ເຊິ່ງໃຊ້ເພື່ອຊ່ວຍປັບຂະຫນາດຂອງແຮງດັນ, ແຕ່ການປັບດັ່ງກ່າວໂດຍທົ່ວໄປບໍ່ມີຫຍັງເຮັດ. ກັບຄວາມຖືກຕ້ອງຂອງຜົນບັງຄັບໃຊ້.

ແຜນວາດແຜນພາບ, ບໍ່ກ່ຽວຂ້ອງກັບຮູບພາບ ແລະຂໍ້ຄວາມ
2. ເຊັນເຊີຄວບຄຸມຜົນບັງຄັບໃຊ້ວົງປິດ
ວິທີການຄວບຄຸມຜົນບັງຄັບໃຊ້ອີກປະການຫນຶ່ງແມ່ນການເພີ່ມເຊັນເຊີຜົນບັງຄັບໃຊ້ແບບດັ້ງເດີມແລະວິທີການຄວບຄຸມວົງປິດແບບທໍາມະດາ.ປະໂຫຍດແມ່ນການປັບປຸງຄວາມຖືກຕ້ອງ, ແຕ່ຂໍ້ເສຍແມ່ນວ່າຄວາມໄວຍັງຊ້າ.ດ້ວຍວິທີນີ້, ຄວາມຖືກຕ້ອງຂອງການຄວບຄຸມຜົນບັງຄັບໃຊ້ສາມາດເພີ່ມຂຶ້ນຈາກ 5% ເປັນ 1%.ຖ້າບໍ່ມີການປະມວນຜົນສູດການຄິດໄລ່ທີ່ຖືກຕ້ອງ, ຫຼືຄວາມໄວຂອງເຊັນເຊີບໍ່ໄວພຽງພໍ, ມັນມີຄວາມສ່ຽງທີ່ຈະ "overshoot".
ບັງຄັບຄວບຄຸມຕົວກະຕຸ້ນ
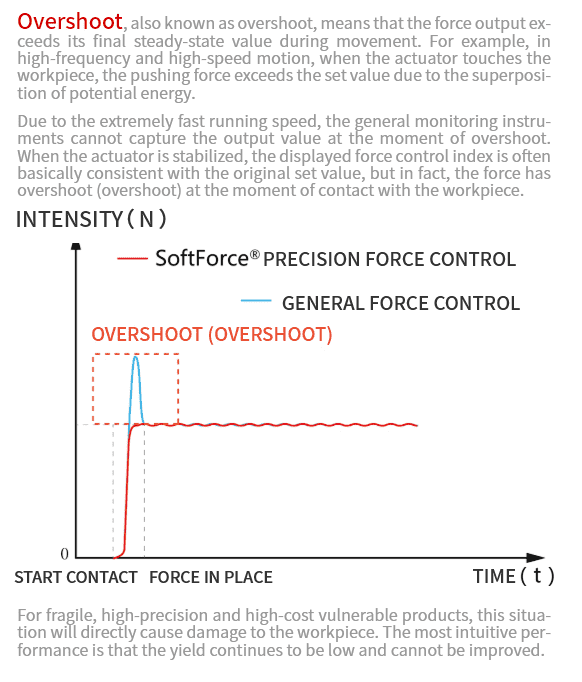
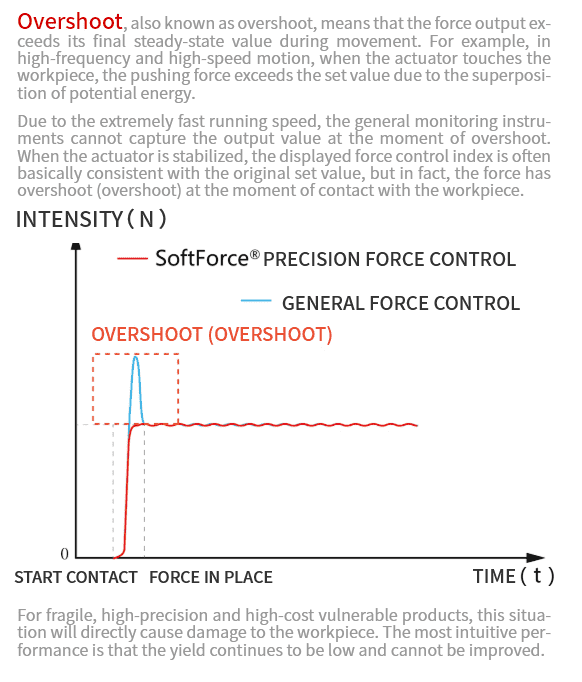
"ການລ່ວງລະເມີດ" ທີ່ຫຼີກລ່ຽງບໍ່ໄດ້?
ວິທີການຄວບຄຸມຜົນບັງຄັບໃຊ້ວົງປິດຂອງເຊັນເຊີແມ່ນຍາກທີ່ຈະຈັດການກັບຜົນບັງຄັບໃຊ້ຜົນກະທົບ.ການສະແດງອອກໂດຍກົງທີ່ສຸດແມ່ນວ່າ "overshoot" ແມ່ນງ່າຍຫຼາຍທີ່ຈະເກີດຂຶ້ນໃນເວລາທີ່ຈັດການກັບ scenes ທີ່ມີຄວາມຕ້ອງການ tempo ສູງ.
ຍົກຕົວຢ່າງ
ໂດຍທົ່ວໄປແລ້ວ, ໃນກໍລະນີຂອງຄວາມໄວສູງແລະຜົນຜະລິດຂະຫນາດໃຫຍ່, ເວລາທີ່ actuator ຕິດຕໍ່ກັບ workpiece ມັກຈະມີຂະຫນາດໃຫຍ່ໂດຍສະເພາະ.ຕົວຢ່າງ: ຖ້າແຮງດັນຂອງຕົວກະຕຸ້ນຖືກຕັ້ງເປັນ 10N, ມັນງ່າຍທີ່ຈະເຂົ້າຫາ 11N ແລະ 12N ເມື່ອມັນແຕະໃສ່ກັບວຽກ, ແລະຫຼັງຈາກນັ້ນມັນຖືກເອີ້ນວ່າກັບຄືນໄປບ່ອນ 10N ຜ່ານລະບົບການຄວບຄຸມ.ບັນຫາດັ່ງກ່າວມັກຈະເກີດຂື້ນໃນເວລາທີ່ເຊັນເຊີບັງຄັບແລະອັນທີ່ເອີ້ນວ່າຕົວກະຕຸ້ນຄວບຄຸມຜົນບັງຄັບໃຊ້ຖືກເພີ່ມເຂົ້າໄປໃນຕະຫຼາດ.
ນີ້ແມ່ນບັນຫາທີ່ຄວາມໄວຕອບສະຫນອງບໍ່ໄວພຽງພໍ.ຄວາມໄວສູງແລະຜົນຜະລິດທີ່ຊັດເຈນແລະຫມັ້ນຄົງແມ່ນຄູ່ຂອງຄວາມຂັດແຍ້ງໃນຕົວຂອງມັນເອງ.ຖ້າມີການ overshoot (overshoot), ກໍາລັງທີ່ແນ່ນອນຢູ່ໃນສະຖານທີ່ແມ່ນບໍ່ມີຄວາມຫມາຍ.
ໂດຍສະເພາະໃນຂະບວນການອຸປະກອນຄວາມແມ່ນຍໍາຂອງການປະກອບຄວາມກົດດັນ, ພາກສ່ວນ fragile ແລະຄ່າໃຊ້ຈ່າຍສູງ, overshoot ໂດຍທົ່ວໄປແມ່ນບໍ່ອະນຸຍາດໃຫ້.
ການຄວບຄຸມຜົນບັງຄັບໃຊ້ຢ່າງເຕັມທີ່, ຄວາມຖີ່ສູງແລະຄວາມໄວສູງໂດຍບໍ່ມີການ overshoot?
TA ເຮັດແນວໃດ?
ສໍາລັບສະຖານະການຄໍາຮ້ອງສະຫມັກທີ່ມີຄວາມແມ່ນຍໍາສູງ, ວິທີການ "ລົງຈອດອ່ອນ" ໄດ້ຖືກຮັບຮອງເອົາເພື່ອຄໍານຶງເຖິງຄວາມຕ້ອງການຂອງຄວາມໄວສູງແລະຄວາມແມ່ນຍໍາສູງ, ນັ້ນແມ່ນ, ການຄວບຄຸມກໍາລັງແບ່ງສ່ວນ.ຕົວກະຕຸ້ນເຂົ້າຫາຊິ້ນວຽກຢ່າງໄວວາໂດຍຜ່ານໂຫມດການເຄື່ອນໄຫວຂອງຕໍາແຫນ່ງ, ປ່ຽນຢ່າງໄວວາໄປສູ່ໂຫມດຄວບຄຸມຜົນບັງຄັບໃຊ້ໃນຕໍາແຫນ່ງທີ່ມັນກໍາລັງຈະຕິດຕໍ່ກັບ workpiece, ແລະຄ່ອຍໆເພີ່ມຜົນຜະລິດຈົນກ່ວາມັນບັນລຸມູນຄ່າທີ່ກໍານົດໄວ້ກ່ອນ.ໂຫມດຕໍາແຫນ່ງ + ໂຫມດຄວບຄຸມຜົນບັງຄັບໃຊ້ + ເວລາສະຖຽນລະພາບຜົນບັງຄັບໃຊ້, ເວລາທີ່ໃຊ້ທັງຫມົດແມ່ນປະສິດທິພາບການປະຕິບັດດຽວຂອງ actuator.
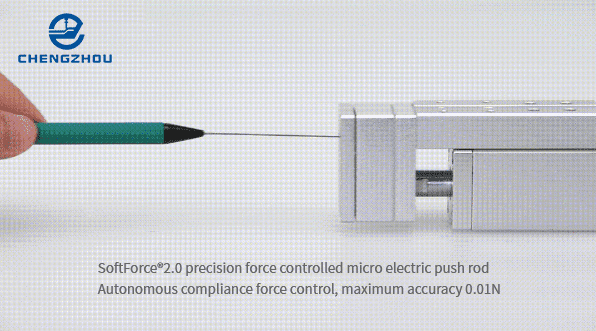
ສົມທົບກັບເຊັນເຊີຜົນບັງຄັບໃຊ້ຄວາມໄວສູງແລະສູດການຄິດໄລ່ການຄວບຄຸມຕາມແບບຈໍາລອງ, ຕົວກະຕຸ້ນຄວບຄຸມຄວາມແມ່ນຍໍາຂອງ SoftForce®2.0 ສາມາດກໍານົດຕໍາແຫນ່ງຂອງຕົວກະຕຸ້ນອັດຕະໂນມັດແລະສະຖານະການຕິດຕໍ່ກັບເຄື່ອງເຮັດວຽກ, ດັ່ງນັ້ນຕົວກະຕຸ້ນ, ເປັນການສິ້ນສຸດຂອງອັດຕະໂນມັດ. ອຸປະກອນ, ມີຫນ້າທີ່ດຽວກັນກັບມືຂອງມະນຸດ.ຄວາມຮັບຮູ້ tactile, ການຄວບຄຸມແລະການປະຕິບັດທາງປັນຍາ.
ໃນໄລຍະດຽວກັນ, ລະດັບຄວາມໄວໃນການລົງຈອດທີ່ອ່ອນໆຂອງ "SoftForce ®2.0 Precision Force Control" ແມ່ນເພີ່ມຂຶ້ນ, ຄວາມທົນທານແມ່ນໃຫຍ່ກວ່າ, ແລະມັນສາມາດບັນລຸການຄວບຄຸມຜົນບັງຄັບໃຊ້ຢ່າງເຕັມທີ່, ເຊິ່ງປັບປຸງວົງຈອນການຜະລິດໂດຍກົງແລະຫຼຸດຜ່ອນຄ່າໃຊ້ຈ່າຍໃນການທົດລອງແລະຢ່າງຫຼວງຫຼາຍ. ການກວດສອບຄວາມຜິດພາດ.
▋ຄວາມຖີ່ຂອງການປະມວນຜົນສູງເພື່ອບັນລຸປະສິດທິພາບທີ່ດີກວ່າ
ວົງຈອນການຄິດໄລ່ຂອງ "ເຊັນເຊີຜົນບັງຄັບໃຊ້ຫົກແກນ + ຫຸ່ນຍົນ" ໂຄງການຄວບຄຸມຜົນບັງຄັບໃຊ້ທົ່ວໄປໃນຕະຫຼາດແມ່ນ 5-10 ມິນລິວິນາທີ, ນັ້ນແມ່ນ, ຄວາມຖີ່ຂອງການປຸງແຕ່ງແມ່ນ 100-200 Hz.ຄວາມຖີ່ຂອງການປະມວນຜົນຂອງ SoftForce®2.0 ຕົວກະຕຸ້ນຄວບຄຸມຄວາມແມ່ນຍໍາຂອງ SoftForce® 2.0 ສາມາດບັນລຸ 4000Hz (ie 0.25 milliseconds), ແລະແບບຈໍາລອງຄວາມຖີ່ສູງສາມາດບັນລຸ 8000Hz, ເຊິ່ງແມ່ນ 4-8 ເທົ່າຂອງຄວາມຖີ່ຂອງການປະມວນຜົນຂອງ actuators ບັງຄັບຫຸ່ນຍົນທົ່ວໄປ.
▋ການຄວບຄຸມຜົນບັງຄັບໃຊ້ທີ່ສອດຄ່ອງກັບ, ເຊິ່ງສາມາດປະຕິບັດຕາມການປ່ຽນແປງຂອງກໍາລັງພາຍນອກ
ອັດຕາການຕອບສະຫນອງປະສິດທິພາບແລະຄໍາຄຶດຄໍາເຫັນຜົນບັງຄັບໃຊ້ທັນທີເຮັດໃຫ້ຕົວກະຕຸ້ນຕອບສະຫນອງທັນທີທັນໃດກັບກໍາລັງພາຍນອກແລະບັນລຸການຄວບຄຸມຜົນບັງຄັບໃຊ້ທີ່ສອດຄ້ອງກັນ.ເຖິງແມ່ນວ່າກໍາລັງປະເຊີນກັບພາຍນອກໃນລະຫວ່າງການປະຕິບັດງານ, ມັນສາມາດປັບຕົວໄດ້ໃນເວລາ, ເຮັດໃຫ້ຂະບວນການມີຄວາມຊັດເຈນຫຼາຍຂຶ້ນ.ການປົກປ້ອງທີ່ດີກວ່າຂອງ workpieces.
ຄວາມຖີ່ສູງແລະຄວາມໄວສູງໂດຍບໍ່ມີການ overshoot
ເຖິງແມ່ນວ່າພາຍໃຕ້ການເຄື່ອນໄຫວທີ່ມີຄວາມຖີ່ສູງແລະຄວາມໄວສູງ, ມັນຍັງຄົງຮັກສາຄວາມຖືກຕ້ອງຂອງຜົນຜະລິດສູງ, ແລະໃນເວລາດຽວກັນຮັບປະກັນ "ການລົງຈອດອ່ອນ" ແລະ "ບໍ່ overshoot", ຕິດຕໍ່ກັບຫນ້າດິນຂອງພາກສ່ວນທີ່ມີຄວາມໄວສູງ, ແຮງຂະຫນາດນ້ອຍ, ແລະປະຕິບັດການຍືດຫຍຸ່ນ. ການເລືອກແລະຈັດວາງຂອງພາກສ່ວນ, ແລະອື່ນໆ, ເພື່ອຫຼີກເວັ້ນການຄວາມເສຍຫາຍຂອງສ່ວນທີ່ລະອຽດອ່ອນແລະອ່ອນແອ.ອົງປະກອບ.
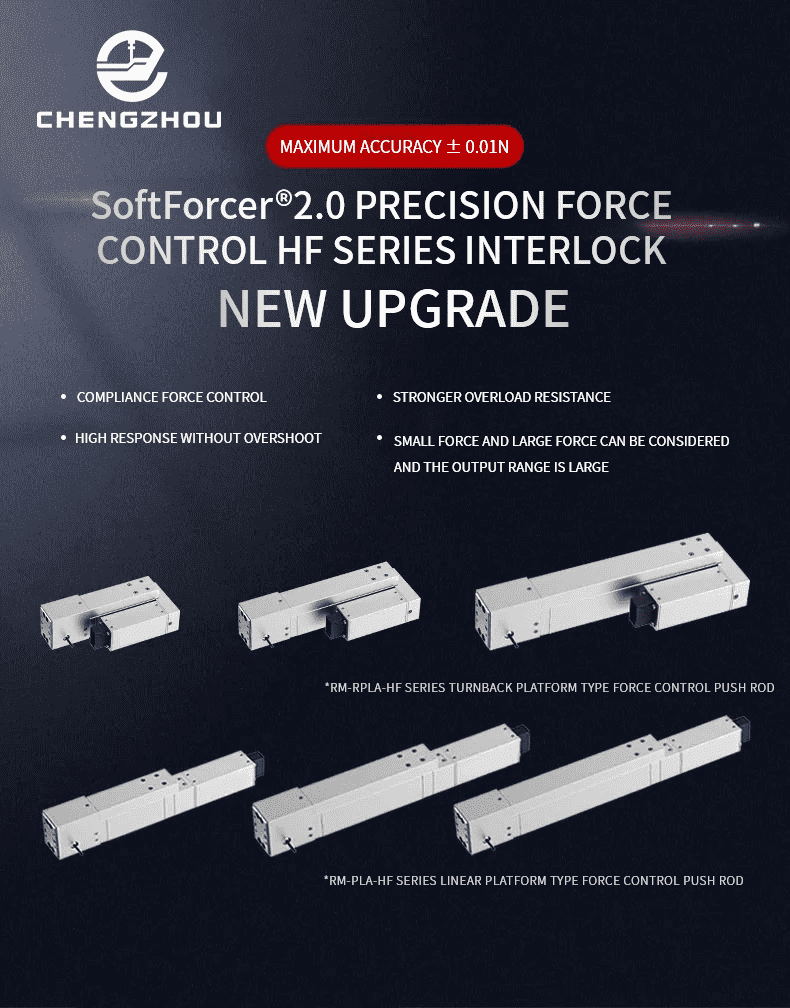
SoftForce®2.0 Precision Force Control
ຊຸດ HF ການຍົກລະດັບໃຫມ່
▋ ຄວາມສາມາດໃນການຕ້ານການໂຫຼດເກີນທີ່ແຂງແຮງກວ່າ
ອີງຕາມຄວາມເຂົ້າໃຈຢ່າງເລິກເຊິ່ງຂອງຂະບວນການຢູ່ໃນສະຖານທີ່ແລະການເຮັດຊ້ໍາກັນຫຼາຍ, ຊຸດ HF SoftForce® 2.0 ການຄວບຄຸມຄວາມແມ່ນຍໍາຂອງ Chengzhou ທີ່ຖືກປັບປຸງໃຫມ່ໃນເດືອນກຸມພາປີນີ້ມີການອອກແບບເຊັນເຊີປະສົມປະສານ, ແລະຄວາມສາມາດໃນການຕ້ານການໂຫຼດເກີນຂອງມັນແມ່ນສູງກວ່າຫຼາຍເທົ່າໃນ. ທີ່ຜ່ານມາ, ມີຄວາມທົນທານສູງແລະຄວາມສະດວກໃນການນໍາໃຊ້.ຮັບມືກັບເງື່ອນໄຂທີ່ສັບສົນຫຼາຍ.
▋ສາມາດຄຳນຶງເຖິງທັງແຮງນ້ອຍ ແລະ ຜົນຜະລິດໃຫຍ່
ພ້ອມກັບລະບົບຄວບຄຸມກຳລັງທີ່ມີຄວາມແມ່ນຍຳສູງ SoftForce®2.0, ຕາຕະລາງສະໄລ້ທີ່ຄວບຄຸມຄວາມແມ່ນຍຳ ແລະ ລໍ້ຍູ້ທີ່ມີເສັ້ນເລືອດຕັນໃນຂະໜາດໃຫຍ່ ແລະ ການໂຫຼດຂະໜາດໃຫຍ່ສາມາດສ້າງແຮງຂະໜາດນ້ອຍ ແລະ ຊັດເຈນພາຍໃຕ້ການໂຫຼດສູງ, ແລະຍັງສາມາດຄຳນຶງເຖິງກຳລັງແຮງໄດ້ພ້ອມກັນ. ເວລາ, ແລະລະດັບຜົນຜະລິດແມ່ນກວ້າງກວ່າ.ຂະໜາດໃຫຍ່ກວ່າ, ເຊັ່ນ: ໄລຍະເຄື່ອນໄຫວຂອງກຳລັງທີ່ກວ້າງຂຶ້ນ*.
*Force Dynamic Range: ອັດຕາສ່ວນລະຫວ່າງແຮງສູງສຸດ ແລະຕໍາ່ສຸດທີ່ ສາມາດອອກໄດ້.
ການຄວບຄຸມຜົນບັງຄັບໃຊ້ຄວາມຊັດເຈນສາມາດໃຊ້ໄດ້ພຽງແຕ່ໃນແກນດຽວ
SoftForce®2.0 ຕົວກະຕຸ້ນຄວບຄຸມຄວາມແມ່ນຍໍາຂອງ SoftForce® 2.0 ບໍ່ພຽງແຕ່ສາມາດນໍາໃຊ້ໃນແກນດຽວ, ແຕ່ຍັງໃຫ້ຄວາມເປັນໄປໄດ້ຫຼາຍສໍາລັບການແກ້ໄຂການປະກອບຫຼາຍແກນ.ສໍາລັບຕົວຢ່າງ, ຫລ້າສຸດ "RM Chengzhou 2D Synchronous Precision Force Control Platform System Control System" ທີ່ເປີດຕົວໂດຍ Chengzhou Technology ແມ່ນປະກອບດ້ວຍສອງຕົວກະຕຸ້ນໄຟຟ້າທີ່ມີຄວາມແມ່ນຍໍາຂອງ Chengzhou, ເຊິ່ງສາມາດທົດແທນຜົນບັງຄັບໃຊ້ຂອງ "ເຊັນເຊີຫົກແກນ + ຫຸ່ນຍົນ" ໂຄງການຄວບຄຸມ, ໃຊ້ສໍາລັບການຂັດຄວາມແມ່ນຍໍາແລະ deburring ຂອງກອບພາຍໃນຂອງໂທລະສັບມືຖື, ແລະອື່ນໆ.
Chengzhou 2D synchronous ຄວາມແມ່ນຍໍາບັງຄັບໃຊ້ລະບົບການຄວບຄຸມເວທີ
(ມີ SoftForce® 2.0 ລະບົບຄວບຄຸມຜົນບັງຄັບໃຊ້ທີ່ມີຄວາມຊັດເຈນສູງ)
ການບໍລິການມືອາຊີບທີ່ຊັບຊ້ອນ ແລະໃຊ້ງ່າຍ
ຂັ້ນຕອນການຄວບຄຸມແບບພິເສດແລະຂະບວນການດີບັກທີ່ງ່າຍດາຍນໍາເອົາປະສົບການຂອງຜູ້ໃຊ້ທີ່ສະດວກສະບາຍໃຫ້ກັບລູກຄ້າ.ເຖິງແມ່ນວ່າຜູ້ປະຕິບັດການທີ່ມີພື້ນຫລັງລະດັບຕ່ໍາກໍ່ສາມາດເລີ່ມຕົ້ນໄດ້ໃນ 5 ນາທີ, "ສຽບແລະຫຼິ້ນ".
ໃນຂະນະດຽວກັນ, ທີມງານບໍລິການດ້ານເຕັກນິກຫຼັງການຂາຍທີ່ເປັນມືອາຊີບແລະເຂັ້ມແຂງຂອງ Chengzhou Technology ສາມາດໃຫ້ລູກຄ້າໄດ້ທັນເວລາ, ທີ່ສົມບູນແບບແລະບໍ່ມີຄວາມກັງວົນໃນການຊ່ວຍເຫຼືອດ້ານວິຊາການໃນຄັ້ງທໍາອິດ, ບໍ່ວ່າຈະເປັນການສົງໄສດ້ານວິຊາການ, ການສອນ, ການແກ້ໄຂບັນຫາຫຼືການບໍາລຸງຮັກສາ.
ເຕັກໂນໂລຊີ Chengzhou ໄດ້ສະເຫມີມີຄວາມກ້າຫານພຽງພໍທີ່ຈະຂະຫຍາຍເຂດແດນຂອງຕົນ.ດ້ວຍຄວາມເຂັ້ມແຂງທາງດ້ານເຕັກນິກທີ່ແຂງແກ່ນແລະມີນະວັດຕະກໍາ, ມັນໄດ້ເປີດຕົວຢ່າງຕໍ່ເນື່ອງຂອງຜະລິດຕະພັນຕົວກະຕຸ້ນທີ່ມີຄຸນນະພາບສູງທີ່ສະຫລາດ, ຊັດເຈນກວ່າແລະເຂົ້າກັນໄດ້ເພື່ອໃຫ້ຜະລິດຕະພັນກ້າວຫນ້າທາງດ້ານການຫຸ້ມຫໍ່ແລະການທົດສອບ semiconductor, ອັດຕະໂນມັດ 3C, ການຜະລິດຄວາມແມ່ນຍໍາ, ການແພດສະຫມາດແລະອຸດສາຫະກໍາອື່ນໆ.ອົງປະກອບຫຼັກເຊັ່ນ: ລະບົບການຄວບຄຸມການເຄື່ອນໄຫວທີ່ມີຄວາມແມ່ນຍໍາແລະຕົວກະຕຸ້ນ.
ເວລາປະກາດ: 31-05-2022