Screwdriver ອັດຕະໂນມັດອັດສະລິຍະ

1. HD ມືຈັບ screwdriver ຊຸດ
ຂໍ້ດີ
● ການອອກແບບສິດທິບັດ
● ຈັບ Ergonomic, ບໍ່ເລື່ອນ, ສະດວກສະບາຍແລະແຫນ້ນ;
●ການຕັ້ງຄ່າການລະບາຍຄວາມຮ້ອນທີ່ມີປະສິດທິພາບ, ຜົນຜະລິດສຽງລົບກວນຕ່ໍາສຸດ;
● servo motor ປະສິດທິພາບສູງ, ກົນໄກການສົ່ງພະລັງງານຂອງເຄື່ອງຫຼຸດຜ່ອນຄວາມແມ່ນຍໍາສູງ;
●ເຊັນເຊີມຸມຄວາມແມ່ນຍໍາສູງ + ສອງສີ LED ສະແດງສະຖານະການລັອກ;
● ລະດັບຄວາມປອດໄພສອດຄ່ອງກັບຂໍ້ມູນທີ່ກ່ຽວຂ້ອງຂອງ GB3883/IEC60745 ແລະມາດຕະຖານອື່ນໆ.
| ໝາຍເລກຕົວແບບ | ຜູ້ວ່າການປັບຕົວ | ຂອບເຂດຜົນຜະລິດຂອງແຮງບິດ | ວິທີການເລີ່ມຕົ້ນ | ຄວາມໄວບໍ່ມີການໂຫຼດສູງສຸດ (rpmj) | ເສັ້ນຜ່າສູນກາງນອກສະກູທີ່ໃຊ້ໄດ້ | |||
| kgf.ຊມ | ນທ | Ibf.in | ກະແຈ | ແຂ້ວກົນ | ແຂ້ວເລື່ອຍຕົນເອງ | |||
| HD 2120 | ACT-H00X | 0.2-235 | 0.02-0.23 | 018-2.04 | V | 5000 | 1.0-23 | 1.0~2.0 |
| HD 2350 | ACT-H01X | 1.52-9.18 | 0.15-0.9 | 1.33-7.97 | V | 1200 | 1.4-3.0 | 1.4-2.6 |
| HD 2351 | ACT-H01X | 1.52-9.18 | 0.15-0.9 | 1.33-7.97 | V | 1200 | 1.4-3.0 | 1.4-2.6 |
| HD 2460 | ACT-H02X | 2.0-12.23 | 0.2-12 | 1.77-10.62 | V | 1000 | 1.4-4.0 | 1.4-3.0 |
| HD 2461 | ACT-H02X | 2.0-12.23 | 0.2-1.2 | 1.77-10.62 | V | 1000 | 1.4-4.0 | 1.4-3.0 |
ຫມາຍເຫດ: ຄ່າຄວາມໄວແລະແຮງບິດຂ້າງເທິງນີ້ແມ່ນຄ່າອ້າງອີງທັງຫມົດ, ເຊິ່ງແມ່ນຂຶ້ນກັບການນໍາໃຊ້ຕົວຈິງ.
| ① | ສາຍຜະລິດຕະພັນ | HD:ມື screwdriver |
| ② | ພະລັງງານມໍເຕີ | 1: servo DC 15W;2:vervo DC 40W;3: ເຊວ DC 60W |
| ③ | ຄວາມໄວສູງສຸດທີ່ບໍ່ມີການໂຫຼດ | 1:5000 2:1500 3:1200 4:1000 5:900 6:600 |
| ④ | ແຮງບິດທີ່ຈັດອັນດັບ (Nm) | 1:0.13 2:0.25 3:0.46 4:0.55 5:0.8 6:1.0 7:1.8 8:3.0. |
| ⑤ | batch ຂອງປະເພດ lever | 0: ຫາງສັ້ນຂອງປະເພດ 1:ຫົກສີ່ຫຼ່ຽມມົນ |
| ຄ່າຄວາມໄວ ແລະແຮງບິດຂ້າງເທິງແມ່ນຄ່າອ້າງອີງທັງໝົດ, ເຊິ່ງຂຶ້ນກັບການນຳໃຊ້ຕົວຈິງ | ||
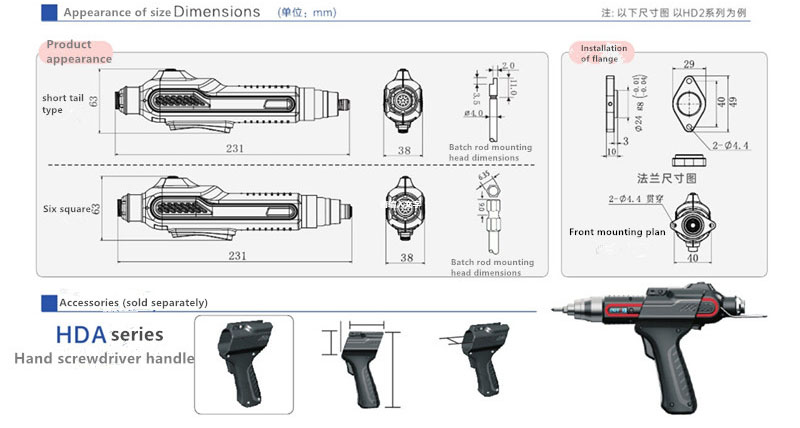
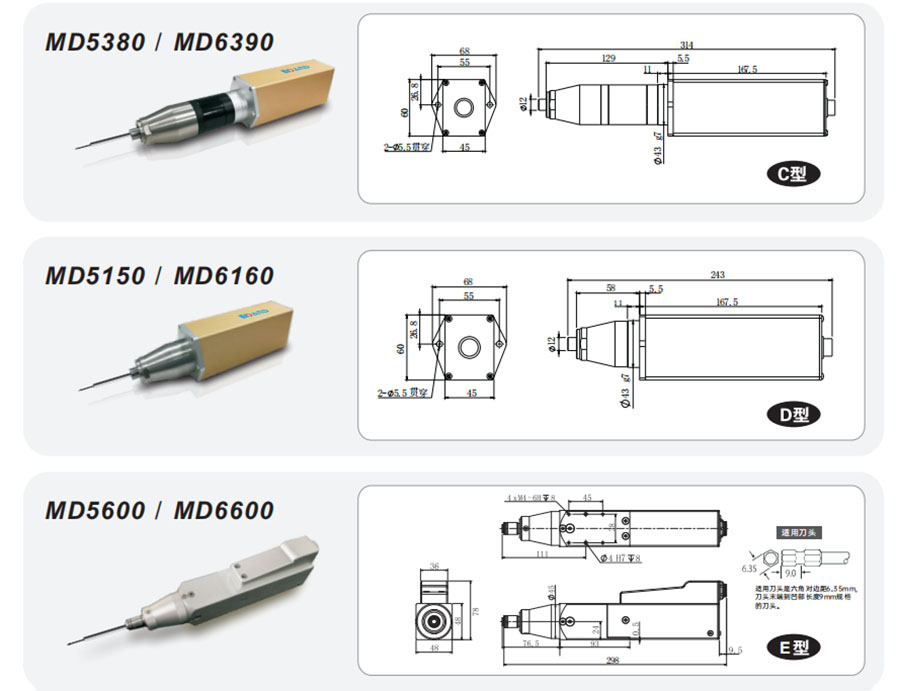
ຮູບລັກສະນະຂອງຂະຫນາດ

Airborne servo batch Series
ຂໍ້ດີ:
●ໂຄງການອອກແບບແບບໂມດູລາແລະປະສົມປະສານຂອງແນວຄວາມຄິດທີ່ເປັນມືອາຊີບ.
● ໂຄງສ້າງການເລັ່ງ ແລະ ການຫຼຸດຄວາມໄວຂອງ servo motor ຊັ້ນນໍາ.
● ເປົ່າ/ດູດວິທີການໃຫ້ອາຫານອັດຕະໂນມັດເປັນທາງເລືອກ.
● ການຕັ້ງຄ່າສາຍເຄເບີ້ນ ແລະຕົວເຊື່ອມຕໍ່ທີ່ປອດໄພ ແລະເຊື່ອຖືໄດ້.
●ຫຼາຍແບບ, ຫຼາຍຊຸດ, ຫຼາຍສະເປັກເລືອກຜະລິດຕະພັນ.
●ໂຄງສ້າງຮູບລັກສະນະທີ່ສວຍງາມແລະຫນາແຫນ້ນ, ວິທີການຕິດຕັ້ງທີ່ສະດວກແລະມີຄວາມຍືດຫຍຸ່ນ, ເຫມາະສົມກັບຄໍາຮ້ອງສະຫມັກຕ່າງໆ.
| ① | ສາຍຜະລິດຕະພັນ | HD: screwdriver ທາງອາກາດ |
| ② | ພະລັງງານມໍເຕີ | 2: ເຊີໂວ DC 40W 5:vervo AC 100W 6:sevo AC150W |
| ③ | ຄວາມໄວສູງສຸດທີ່ບໍ່ມີການໂຫຼດ | 1:5000 3:1200 4:1000 6:500 7:300 |
| ④ | ແຮງບິດທີ່ຈັດອັນດັບ (Nm) | 2:0.25 5:0.9 6:1.2 8:3.0 9:4.5 0:6.5/10 |
| ຄ່າຄວາມໄວ ແລະແຮງບິດຂ້າງເທິງແມ່ນຄ່າອ້າງອີງທັງໝົດ, ເຊິ່ງຂຶ້ນກັບການນຳໃຊ້ຕົວຈິງ | ||
ສະເພາະດ້ານວິຊາການ
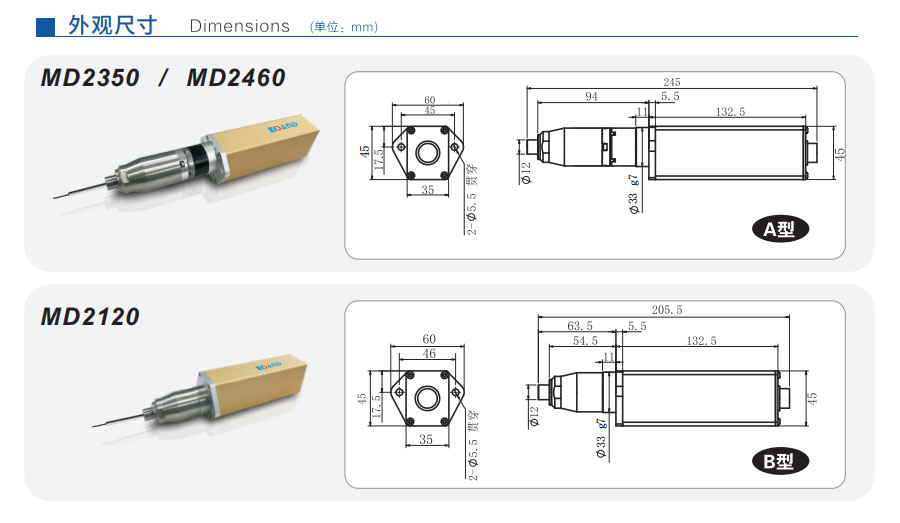
| ຕົວແບບ | ຕົວຄວບຄຸມການປັບຕົວ | ສາຍເຄື່ອງມື | ຂອບເຂດຜົນຜະລິດຂອງແຮງບິດ | ຄວາມໄວສູງສຸດ (rpm) | ຂະໜາດ | ນ້ຳໜັກ(kg) | ສະຫມັກຫົວຫນ້າກຸ່ມ | ເສັ້ນຜ່າສູນກາງນອກສະກູທີ່ໃຊ້ໄດ້ (ມມ) | ||
| kgf.ຊມ | ນທ | Ibf.in | ||||||||
| MD2120 | ACT-MOX | C112X | 0.20-2.35 | 0.02-0.23 | 0.18-2.04 | 5000 | B | 0.5 | ປະເພດຫາງ | 1.0-2.0 |
| MD2350 | ACT-M01X | 1.52~9.18 | 0.15-0.90 | 1.33-7.97 | 1200 | A | 0.7 | ປະເພດຫາງ | 2.0~3.0 | |
| MD2460 | ACT-M02X | 2.00-12.23 | 0.20-1.20 | 1.77-10.62 | 1000 | A | 0.7 | ປະເພດຫາງ | 2.0-4.0 | |
| MD5150 | ACT-M10X | C212X | 2.04-9.18 | 0.20-0.90 | 1.77-7.97 | 5000 | D | 1.0 | ຫົກຫຼ່ຽມ | 1.8-3.0 |
| MD5380 | ACT-M11X | 8.16-30.60 | 0.80-3.00 | 7.08-26.55 | 1200 | C | 1.3 | ຫົກຫຼ່ຽມ | 2.5-5.0 | |
| MD5600 | ACT-M14X | 10.20~66.28 | 1.00-6.50 | 8.85-70.80 | 600 | E | 1.5 | SH1/4 | 4.0-6.0 | |
| MD6160 | ACT-M20X | 3.06-13.26 | 0.30'1.30 | 2.66-11.50 | 5000 | D | 1.1 | ຫົກຫຼ່ຽມ | 2.0-4.0 | |
| MD6390 | ACT-M21X | 10.20~45.90 | 1.00-4.50 | 8.85-39.83 | 1200 | C | 1.4 | ຫົກຫຼ່ຽມ | 3.0-6.0 | |
| MD6600 | ACT-M24X | 40.79-101.97 | 4.00-10.00 | 35.40-88.50 | 600 | E | 1.7 | SH1/4 | 6.0-8.0 | |
ຫມາຍເຫດ: Controller x ຊີ້ບອກປະເພດຂອງການໂຕ້ຕອບຜູ້ໃຊ້, 0:IO;1:IO+RS232;2:IO+RS485;3:IO+CANopen;4:IO+ອີເທີເນັດ;5:IO:+EtherCAT
ຂະຫນາດພາຍນອກ
ແຫນ້ນຊຸດ
ຂໍ້ດີ:
●ການອອກແບບທີ່ດີທີ່ສຸດແລະປະສົມປະສານຂອງແຮງບິດ, ຄວາມໄວແລະຄວາມແມ່ນຍໍາ.
●ສະດວກແລະມີຄວາມຍືດຫຍຸ່ນ, ຫຼາຍທິດທາງແລະຫຼາຍປະເພດ shaft tightening output ແລະວິທີການຕິດຕັ້ງ.
●ມີສຽງລົບກວນຕ່ໍາ, ການສັ່ນສະເທືອນຕ່ໍາ, ຊີວິດຍາວ, ຄຸນລັກສະນະການດໍາເນີນງານທີ່ມີຄວາມຫນ້າເຊື່ອຖືສູງ.
● ເທັກໂນໂລຍີຫຼັກ, ການປັບແຕ່ງລູກຄ້າດ້ວຍສິດທິຊັບສິນເອກະລາດ (OEM/ODM).

ຕົວແບບ
ດ້ວຍຕົວຫຼຸດ
| ① | ສາຍຜະລິດຕະພັນ | MT: screwdriver smart torque ສູງ |
| ② | ພະລັງງານມໍເຕີ | 7: ເຊີໂວ AC 200W 8:vervo AC 400W 9:sevo AC 750W |
| ③ | ຄວາມໄວສູງສຸດທີ່ບໍ່ມີການໂຫຼດ (rpm) | 3:1200 4:1000 6:500 7:300 8:200 |
| ④ | ແຮງບິດທີ່ຈັດອັນດັບ (Nm) | 1:6 2:12 3:28 4:51 5:80 6:143. |
| ຄ່າຄວາມໄວ ແລະແຮງບິດຂ້າງເທິງແມ່ນຄ່າອ້າງອີງທັງໝົດ, ເຊິ່ງຂຶ້ນກັບການນຳໃຊ້ຕົວຈິງ | ||
ໂດຍບໍ່ມີການຫຼຸດຜ່ອນ
| ① | ສາຍຜະລິດຕະພັນ | MS: servo motor MU: torque sensor |
| ② | ພະລັງງານມໍເຕີ | 7: ເຊີໂວ AC 200W 8:vervo AC 400W 9:sevo AC 750W |
| ③ | ຄວາມໄວສູງສຸດທີ່ບໍ່ມີການໂຫຼດ (rpm) | 1:5000 |
| ④ | ແຮງບິດທີ່ຈັດອັນດັບ (Nm) | 1:1.9 2:3.8 3:7.1 ລ.ມ |
| ຄ່າຄວາມໄວ ແລະແຮງບິດຂ້າງເທິງແມ່ນຄ່າອ້າງອີງທັງໝົດ, ເຊິ່ງຂຶ້ນກັບການນຳໃຊ້ຕົວຈິງ | ||
| ຂໍ້ມູນຈໍາເພາະ | ||||
| ຕົວແບບ | ຕົວຄວບຄຸມການປັບຕົວ | ສາຍເຄື່ອງມື | ແຮງບິດ | ແບບ rotor |
| MT7310 | ACT-M31X | C311X | 3~6 | 1200 |
| MT8320 | ACT-M41X | C311X | 5~12 | 1200 |
| MT8730 | ACT-M47X | C311X | 10~28 | 300 |
| MT9430 | ACT-M52X | C311X | 10~28 | 1000 |
| MT9750 | ACT-M58X | C311X | 30~80 | 300 |
| MT9860 | ACT-M59X | C311X | 40–143 | 200 |
| MS7110 | ACT-M30X | C311X | 0.4~1.9 | 5000 |
| MS8120 | ACT-M40X | C311X | 0.8~3.8 | 5000 |
| MS9130 | ACT-M50X | C311X | 1.2~7.1 | 5000 |
| ຂະຫນາດຂອງຫົວ shaft ສາມາດປັບແຕ່ງໄດ້ຕາມການນໍາໃຊ້ຕົວຈິງຂອງລູກຄ້າ.ກະລຸນາປຶກສາພະນັກງານຂາຍຂອງພວກເຮົາກ່ອນທີ່ຈະຊື້. | ||||
| ປະເພດ servo motor ແລະ batch rod ບໍ່ສາມາດເຊື່ອມຕໍ່ຍາກ. [ໝາຍເຫດ 1] Controller X ຊີ້ບອກສ່ວນຕິດຕໍ່ຜູ້ໃຊ້ປະເພດ 0:10;1:10+RS232;2:10+RS485;3:10+CANopen; 4:10+ອີເທີເນັດ;5: 10+ EtherCAT | ||||
| ອະແດບເຕີ batch rod ທາງເລືອກ, ເຫມາະສົມກັບ 1/4 (6. 35) hexagonal batch rod, ກະລຸນາປຶກສາພະນັກງານຂາຍຂອງພວກເຮົາກ່ອນທີ່ຈະເລືອກ. | ||||

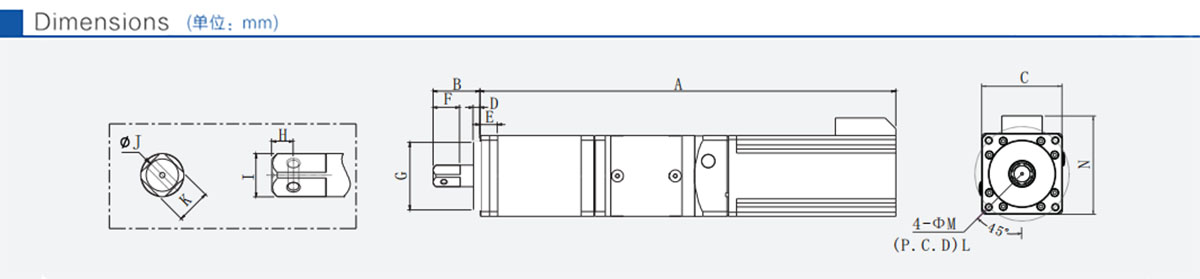
| ຕົວແບບ | A | B | c | D | E | F | G | H | I | J | K | L | M | N | ນ້ໍາຫນັກ |
| MT7310 | 269 | 28 | 60 | 3 | 13 | 15 | □50g7 | 6 | □ 12h7 | 3 | □ 9.5 | 70 | 5.5 | 73 | 2.9 |
| MT8320 | 291 | 28 | 60 | 3 | 13 | 15 | □50g7 | 6 | □ 12h7 | 3 | □ 9.5 | 70 | 5.5 | 73 | 3.3 |
| MT8730 | 309 | 35 | 60 | 5 | 13 | 20 | □50g7 | 8 | □ 16h7 | 4 | □ 12.7 | 70 | 5.5 | 73 | 3.6 |
| MT9430 | 319 | 35 | 90 | 5 | 13 | 20 | □80g7 | 8 | □ 16h7 | 4 | □ 12.7 | 100 | 7 | 93 | 6.6 |
| MT9750 | 340 | 40 | 90 | 6 | 13 | 25 | □80g7 | 9 | □ 25h7 | 4 | □ ໑໙ | 100 | 7 | 93 | 7.3 |





