ຕໍ່ໄປນີ້ແມ່ນເວທີທີ່ຈະສອນທ່ານກ່ຽວກັບວິທີການເລືອກ gripper ໄຟຟ້າທີ່ເຫມາະສົມ!
[Q] ວິທີການເລືອກເຄື່ອງຈັບໄຟຟ້າທີ່ເຫມາະສົມຢ່າງໄວວາແນວໃດ?
[ຄໍາຕອບ] ການຄັດເລືອກໄວສາມາດເຮັດໄດ້ໂດຍຜ່ານຫ້າເງື່ອນໄຂ:
① ເລືອກແຮງຍຶດຕາມນ້ໍາຂອງ workpiece ໄດ້;
②ເລືອກ stroke clamping ຕາມຂະຫນາດຂອງ workpiece ໄດ້;
③ ເລືອກຕົວຈັບໄຟຟ້າທີ່ເໝາະສົມ ແລະຂະໜາດຕາມສະຖານະການນຳໃຊ້;
④ ເລືອກລາຍການທີ່ເປັນປະໂຫຍດຕາມຄວາມຕ້ອງການຂອງການຈັບໄດ້ (ເຊັ່ນ: ການປິດການປິດການປິດດ້ວຍຕົນເອງ locking, ການປັບຕົວຊອງ, ພືດຫມູນວຽນ infinite, ແລະອື່ນໆ).
⑤ ເລືອກຕົວຈັບໄຟຟ້າທີ່ກົງກັບລະດັບ IP ຕາມຄວາມຕ້ອງການຂອງສະພາບແວດລ້ອມການນໍາໃຊ້.
[Q] ການເດີນທາງທີ່ມີປະສິດທິພາບແມ່ນຫຍັງ?
[ຄໍາຕອບ] ມັນແມ່ນຂອບເຂດສູງສຸດທີ່ປາຍນິ້ວມືຂອງມືຈັບສາມາດເຄື່ອນຍ້າຍໄດ້ຢ່າງເສລີ.ໃນເວລາທີ່ເສັ້ນເລືອດຕັນໃນຂອງຄາງກະໄຕ gripper ແມ່ນຫຼາຍກ່ວາໄລຍະສູງສຸດທີ່ຕ້ອງການເພື່ອຍ້າຍປາຍນິ້ວມື, gripper ກັບເສັ້ນເລືອດຕັນໃນນັ້ນແມ່ນເຫມາະສົມ.
[Q] ບໍ່ gripper ໄຟຟ້າສະຫນັບສະຫນູນການຍຶດເສັ້ນຜ່າສູນກາງພາຍໃນ?
[ຄໍາຕອບ] Gripper ໄຟຟ້າສະຫນັບສະຫນູນ clamping ເສັ້ນຜ່າສູນກາງພາຍໃນ, ນັ້ນແມ່ນ, gripper ໄຟຟ້າສາມາດປະຕິບັດການຄວບຄຸມຜົນບັງຄັບໃຊ້ແລະການຄວບຄຸມຄວາມໄວສໍາລັບການເປີດແລະປິດ.
[Q] ມຸມຫມຸນທີ່ສະຫນັບສະຫນູນໂດຍ gripper rotary ແມ່ນຫຍັງ?
[ຄໍາຕອບ] rotating gripper ໄຟຟ້າຊຸດ RGI ສະຫນັບສະຫນູນການຫມຸນທີ່ບໍ່ມີຂອບເຂດ.
[Q] ປະເພດໃດແດ່ຂອງມໍເຕີຖືກນໍາໃຊ້ສໍາລັບ gripper ໄຟຟ້າ?
[ຄໍາຕອບ] ໃຊ້ຄວາມຫນາແຫນ້ນຂອງພະລັງງານສູງ ມໍເຕີ DC synchronous ແມ່ເຫຼັກຖາວອນ.ມັນຮັບຮອງເອົາການອອກແບບ slotless ທີ່ມີປະສິດທິພາບສູງ.ເມື່ອປຽບທຽບກັບມໍເຕີ stepping ແລະມໍເຕີ servo ທໍາມະດາ, ມັນມີແຮງບິດຢ່າງຕໍ່ເນື່ອງສູງ, ປະສິດທິພາບສູງ, ລະບຽບຄວາມໄວທີ່ຊັດເຈນ, ຂະຫນາດຂະຫນາດນ້ອຍ, ນ້ໍາຫນັກເບົາ, ການສູນເສຍ friction ຕ່ໍາ, ແລະປະສິດທິພາບການເລັ່ງແລະ deceleration ດີ.ຂໍ້ໄດ້ປຽບ.
[Q] ເຄື່ອງຈັບໄຟຟ້າຖືກຕ້ອງເທົ່າໃດ?
[ຄໍາຕອບ] ການເຮັດເລື້ມຄືນຂອງຕໍາແຫນ່ງ clamping ສາມາດບັນລຸເຖິງບວກຫຼືລົບ 0.02mm (ສອງສາຍ);ອັດຕາການແຍກຕໍາແຫນ່ງສາມາດບັນລຸບວກຫຼືລົບ 0.03mm (ສາມສາຍ);ຄວາມຖືກຕ້ອງຂອງການຄວບຄຸມຜົນບັງຄັບໃຊ້ສາມາດບັນລຸເຖິງ 0.1N (ຜ່ານການກວດສອບການຜະລິດຂະຫນາດໃຫຍ່ຂອງອຸດສາຫະກໍາການຜະລິດຂອງລູກຄ້າຂອງ Top10).
[Q] ເມື່ອປຽບທຽບກັບຮອຍທພບທາງອາກາດ, ຂໍ້ດີຂອງຮອຍທພບໄຟຟ້າແມ່ນຫຍັງ?
[ຄໍາຕອບ] ① Grippers ໄຟຟ້າສາມາດບັນລຸການຄວບຄຸມຜົນບັງຄັບໃຊ້ທີ່ຊັດເຈນ, ແລະຜູ້ທີ່ມີຄວາມຕ້ອງການສໍາລັບການຄວບຄຸມແຮງຈັບ, ເຊັ່ນ: ອົງປະກອບບາງໆແລະ fragile, ຈະບໍ່ເຮັດໃຫ້ເກີດຄວາມເສຍຫາຍຂອງອົງປະກອບ;
② Gripper ໄຟຟ້າສາມາດ elastically ປັບຈັງຫວະ clamping ເພື່ອຮັບຮູ້ clamping ຂອງອົງປະກອບຂອງຂະຫນາດທີ່ແຕກຕ່າງກັນ;
③ຄວາມໄວການຍຶດຂອງ gripper ໄຟຟ້າແມ່ນສາມາດຄວບຄຸມໄດ້, ເຊິ່ງສາມາດວາງແຜນຢ່າງສະຫຼາດເພື່ອປັບປຸງປະສິດທິພາບການເຮັດວຽກ;
④ ການອອກແບບປະສົມປະສານຂອງເຄື່ອງຄວບຄຸມການຂັບຂີ່ຂອງທໍ່ໄຟຟ້າ, ເຊື່ອມຕໍ່ໂດຍກົງກັບລົດເມ, ເຮັດໃຫ້ສາຍສາຍການຜະລິດງ່າຍຂຶ້ນຫຼາຍ ແລະປະຫຍັດພື້ນທີ່ຫຼາຍ, ແລະສະອາດ ແລະປອດໄພ;
⑤ ການຊົມໃຊ້ພະລັງງານຂອງຕົວຈັບໄຟຟ້າແມ່ນຕໍ່າກວ່າເຄື່ອງຈັບລົມ.
ຮ່າງກາຍຂະຫນາດນ້ອຍ, ຕົວກະຕຸ້ນໄຟຟ້າພະລັງງານຂະຫນາດໃຫຍ່
1. ການແນະນໍາຜະລິດຕະພັນ
ເຄື່ອງກະຕຸ້ນໄຟຟ້າຂະໜາດນ້ອຍ servo ປະສົມປະສານ micromotor, ເຄື່ອງຫຼຸດດາວເຄາະ, ກົນໄກສະກູ, ເຊັນເຊີ, ແລະລະບົບຂັບແລະຄວບຄຸມ, ເຊິ່ງສາມາດຮັບຮູ້ການຄວບຄຸມ servo ທີ່ຊັດເຈນຢູ່ທຸກຕໍາແຫນ່ງພາຍໃນຂອບເຂດເສັ້ນເລືອດຕັນ.ເຊັນເຊີຕໍາແຫນ່ງຢ່າງແທ້ຈິງໃນຕົວ, ຂໍ້ມູນຕໍາແຫນ່ງຈະບໍ່ສູນເສຍຫຼັງຈາກຄວາມລົ້ມເຫຼວຂອງພະລັງງານ, ແລະບໍ່ຈໍາເປັນຕ້ອງມີການດໍາເນີນງານສູນ.
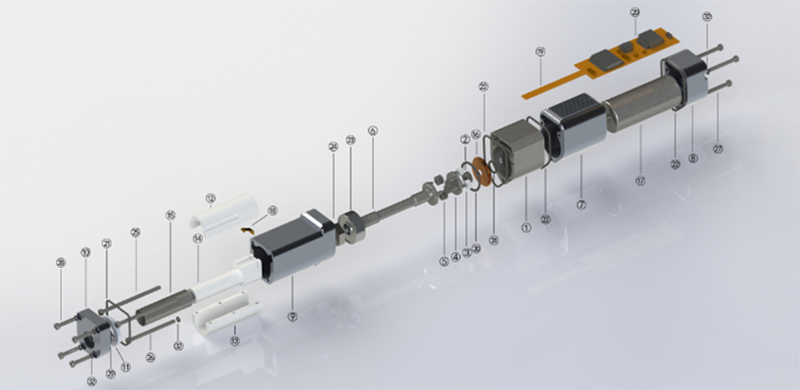
ແຜນວາດໂຄງສ້າງຕົວກະຕຸ້ນເສັ້ນຈຸນລະພາກ
ການອອກແບບປະສົມປະສານຂອງ micro servo actuator drive ແລະການຄວບຄຸມ, ຂະຫນາດຂະຫນາດນ້ອຍ, ຄວາມຫນາແຫນ້ນຂອງພະລັງງານສູງ, ຄໍາຄຶດຄໍາເຫັນຜົນບັງຄັບໃຊ້ຄວາມແມ່ນຍໍາສູງແລະຄວາມຖືກຕ້ອງຂອງຕໍາແຫນ່ງສູງ.
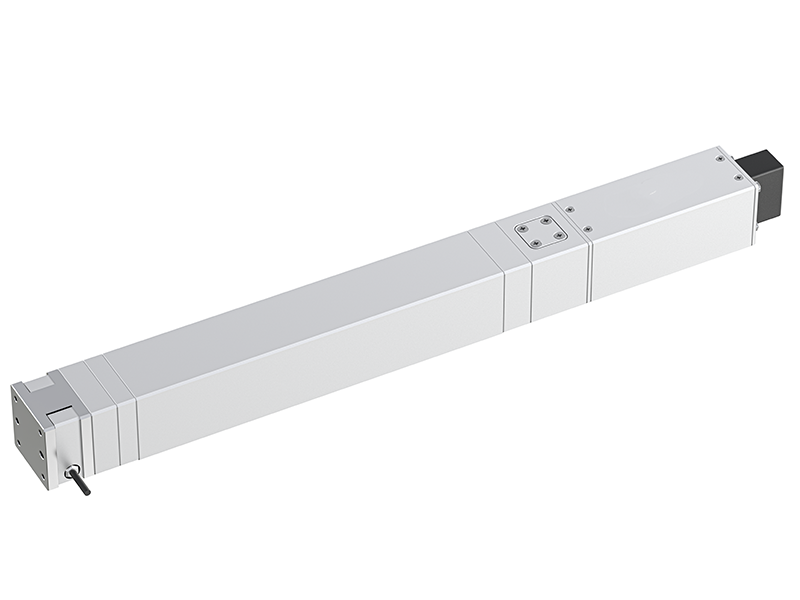 ແຜນວາດ Micro Linear Actuator
ແຜນວາດ Micro Linear Actuator
2. ຂໍ້ໄດ້ປຽບຕົ້ນຕໍ
①ເຄື່ອງກະຕຸ້ນໄຟຟ້າ servo ຂະຫນາດນ້ອຍທີ່ມີຄວາມຫນາແຫນ້ນຂອງພະລັງງານສູງສຸດໃນປະເທດຈີນ.
② ຄວາມຖືກຕ້ອງການຕັ້ງຕໍາແຫນ່ງທີ່ສູງທີ່ສຸດສາມາດບັນລຸລະດັບ micron.
③ ການເຊື່ອມໂຍງລະດັບສູງ, ວິສະວະກອນຄໍາຮ້ອງສະຫມັກສາມາດສຸມໃສ່ການພັດທະນາຂອງຫນ້າທີ່ອຸປະກອນ.
④ມັນມີການໂຕ້ຕອບກົນຈັກອຸດົມສົມບູນແລະການໂຕ້ຕອບໄຟຟ້າ.
⑤ຫຼາຍກ່ວາ 100 ແບບຕອບສະຫນອງຄວາມຕ້ອງການຂອງພາກສະຫນາມຄໍາຮ້ອງສະຫມັກຕ່າງໆ.
⑥ການຜະລິດທ້ອງຖິ່ນ, ໄລຍະເວລາການຈັດສົ່ງທີ່ຫມັ້ນຄົງ, ສະຫນັບສະຫນູນການປັບແຕ່ງພິເສດ.
3. ທິດທາງການນໍາໃຊ້ຜະລິດຕະພັນ
ການນໍາໃຊ້ຕົ້ນຕໍ: ອຸດສາຫະກໍາການແພດ, ການຄົ້ນຄວ້າວິທະຍາສາດແລະການສຶກສາ, ອັດຕະໂນມັດອຸດສາຫະກໍາ, ຍານອາວະກາດ, ເຄື່ອງເອເລັກໂຕຣນິກການບໍລິໂພກ.
4. ຫຼັກການເຮັດວຽກຂອງຕົວກະຕຸ້ນເສັ້ນຊື່ແມ່ນຫຍັງ?
Micro Linear Actuator ແມ່ນ rod push electric micro servo, ເຊິ່ງລວມເອົາມໍເຕີຈຸນລະພາກ, ຕົວຫຼຸດຜ່ອນ, ກົນໄກຂອງສະກູ, ເຊັນເຊີແລະລະບົບຄວບຄຸມການຂັບຂີ່, ແລະສາມາດຮັບຮູ້ການຄວບຄຸມ servo ທີ່ຊັດເຈນຢູ່ທຸກຕໍາແຫນ່ງພາຍໃນຂອບເຂດເສັ້ນເລືອດຕັນ.ເຊັນເຊີຕໍາແຫນ່ງຢ່າງແທ້ຈິງໃນຕົວ, ຂໍ້ມູນຕໍາແຫນ່ງຈະບໍ່ສູນເສຍຫຼັງຈາກຄວາມລົ້ມເຫຼວຂອງພະລັງງານ, ແລະບໍ່ຈໍາເປັນຕ້ອງມີການດໍາເນີນງານສູນ.
5. ຊຸດໃດສາມາດແບ່ງອອກໄດ້ຕາມຫນ້າທີ່?
ໄດ servo ເສັ້ນຂະຫນາດນ້ອຍສາມາດແບ່ງອອກເປັນສອງຊຸດ: ປະເພດມາດຕະຖານແລະປະເພດການຄວບຄຸມຜົນບັງຄັບໃຊ້ຕາມຫນ້າທີ່ຂອງມັນ.ການໄດ້ຮັບສັນຍານທີ່ສອດຄ້ອງກັນແລະລະບົບການກັ່ນຕອງສາມາດກວດພົບຜົນບັງຄັບໃຊ້ຕົວຈິງຂອງ micro linear servo drive.
ເວລາປະກາດ: Feb-04-2023